Timeline
-
Commemorative publication on the history of robots in Italy by SIRI
2025
 To commemorate its 50th anniversary and preserve the legacy of Italian robotics, the SIRI initiated the publication of a dedicated book, that not only traces SIRI’s journey but also highlights Italy’s pioneering contributions to robotics even before the Association’s founding. Find our more at 50th Anniversary of SIRI
To commemorate its 50th anniversary and preserve the legacy of Italian robotics, the SIRI initiated the publication of a dedicated book, that not only traces SIRI’s journey but also highlights Italy’s pioneering contributions to robotics even before the Association’s founding. Find our more at 50th Anniversary of SIRI -
The Meca500 - smallest 6-axis-robot
2016
 The Meca500 is the smallest six-axis industrial robot on the market. It weighs only 4.6 kg, and that's with its controller, which is embedded in the robot's base. The payload of the robot is 0.5 kg. And finally, the robot's repeatability is 5 micrometers.
Source
The Meca500 is the smallest six-axis industrial robot on the market. It weighs only 4.6 kg, and that's with its controller, which is embedded in the robot's base. The payload of the robot is 0.5 kg. And finally, the robot's repeatability is 5 micrometers.
Source -
Softbank introduces Pepper
2014
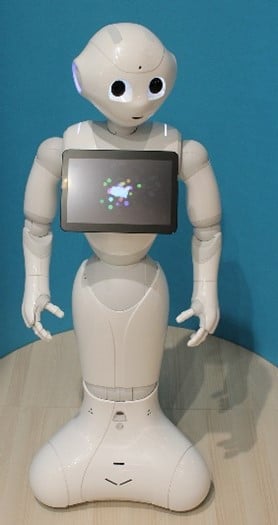 Pepper was jointly developed by the French company Aldebaran Robotics SAS and the Japanese telecommunications and media group SoftBank Mobile Corp. It is the first humanoid social robot with the ability to recognize faces and basic human emotions through analysing facial expressions and tone of voice. It is currently employed at various shops, restaurants and other public spaces around the world. © photo Aldebaran
Pepper was jointly developed by the French company Aldebaran Robotics SAS and the Japanese telecommunications and media group SoftBank Mobile Corp. It is the first humanoid social robot with the ability to recognize faces and basic human emotions through analysing facial expressions and tone of voice. It is currently employed at various shops, restaurants and other public spaces around the world. © photo Aldebaran -
Precise Automation introduced the first collaborative SCARA robot
2013
 The PF400 is a tabletop robot with an intrinsic safety system. It is opening up opportunities for laboratory automation, as it provides a small footprint and can be used without shields. Its four axis motion controller combines the advantages of bigger and more powerful controllers with a significantly lower prize and a small size and power profile required for laboratory uses. Source
The PF400 is a tabletop robot with an intrinsic safety system. It is opening up opportunities for laboratory automation, as it provides a small footprint and can be used without shields. Its four axis motion controller combines the advantages of bigger and more powerful controllers with a significantly lower prize and a small size and power profile required for laboratory uses. Source -
First Humanoid Robot in Space
2011
 A Robonaut (R2B) launches up to the International Space Station. R2 is the first humanoid robot in space. Initially R2 was deployed on a fixed pedestal inside the ISS. Next steps include a leg for climbing through the corridors of the Space Station, upgrades for R2 to go outside into the vacuum of space.
source
A Robonaut (R2B) launches up to the International Space Station. R2 is the first humanoid robot in space. Initially R2 was deployed on a fixed pedestal inside the ISS. Next steps include a leg for climbing through the corridors of the Space Station, upgrades for R2 to go outside into the vacuum of space.
source -
KUKA (Germany) launched a new series of shelf-mounted robots (Quantec) with a new controller KR C4
2010
 The Quantec K robots have an extremely low base, allowing a greater lower reach for unloading applications. The new KR C4 controller generation is the first to combine the complete safety controller in a single control system. This allows all tasks to be carried out at once.
source
The Quantec K robots have an extremely low base, allowing a greater lower reach for unloading applications. The new KR C4 controller generation is the first to combine the complete safety controller in a single control system. This allows all tasks to be carried out at once.
source -
Cyberdyne launches HAL, the first powered exoskeleton to support paraplegics
2009
 HAL (Hybrid Assistive Limb) jointly was developed by Japan's Tsukuba University and the company Cyberdyne. It is a powered exoskeleton that is designed to support and expand the physical capabilities of its users, particularly people with physical disabilities. HAL 3 provides only leg function, HAL 5 is a full-body exoskeleton for the arms, legs, and torso. In 2013, HAL received global safety certification. Source image © Cyberdyne
HAL (Hybrid Assistive Limb) jointly was developed by Japan's Tsukuba University and the company Cyberdyne. It is a powered exoskeleton that is designed to support and expand the physical capabilities of its users, particularly people with physical disabilities. HAL 3 provides only leg function, HAL 5 is a full-body exoskeleton for the arms, legs, and torso. In 2013, HAL received global safety certification. Source image © Cyberdyne -
Release of ROS (Robot Operating System)
2009
Willow Garage releases the first version of ROS, an open source collection of software intended to reduce programming effort and propel the development of robot applications. ROS has quickly gained acceptance and has a growing community, which is supported by the Open Source Robotics Foundation (OSRF) and the ROS Industrial Consortium. ROS has a tremendous impact on the education of young roboticists and is widely spread in the academic world. Source
-
ABB, Sweden, launched the smallest multipurpose industrial robot, IRB120
2009
 ABB's smallest ever multipurpose industrial robot weighs just 25kg and can handle a payload of 3kg (4kg for vertical wrist) with a reach of 580mm.
source
ABB's smallest ever multipurpose industrial robot weighs just 25kg and can handle a payload of 3kg (4kg for vertical wrist) with a reach of 580mm.
source -
Yaskawa Motoman, Japan, introduces control system to sync up to 8 robots
2009
 Yaskawa Motoman, Japan, introduced the improved robot control system (DX100) which provided the fully synchronized control of eight robots, up to 72 axis. I/O devices and communication protocols. Dynamic interference zones protect robot arm and provide advanced collision avoidance.
source
Yaskawa Motoman, Japan, introduced the improved robot control system (DX100) which provided the fully synchronized control of eight robots, up to 72 axis. I/O devices and communication protocols. Dynamic interference zones protect robot arm and provide advanced collision avoidance.
source -
Universal Robots sold its first cobot
2008
 The Danish company Universal Robots introduced UR5, a robot capable of safely operating alongside workers, eliminating the need for safety caging or fencing. UR5 was the first cost-efficient and user-friendly collaborative robot. It paved the way for the industry to target small and medium-sized manufacturers who had previously considered robotics too costly and complex. Source
The Danish company Universal Robots introduced UR5, a robot capable of safely operating alongside workers, eliminating the need for safety caging or fencing. UR5 was the first cost-efficient and user-friendly collaborative robot. It paved the way for the industry to target small and medium-sized manufacturers who had previously considered robotics too costly and complex. Source -
FANUC, Japan, launched a new heavy duty robot with a payload of almost 1,200kg
2008
 "The M-2000iA is the world's largest and strongest six-axis robot," said Rich Meyer, product manager, Fanuc Robotics . "It has the longest reach and the strongest wrist surpassing all other six-axis robots available today. The wrist strength sets a record, but more importantly, allows our customers to move large heavy parts a great distance with maximum stability."
source
"The M-2000iA is the world's largest and strongest six-axis robot," said Rich Meyer, product manager, Fanuc Robotics . "It has the longest reach and the strongest wrist surpassing all other six-axis robots available today. The wrist strength sets a record, but more importantly, allows our customers to move large heavy parts a great distance with maximum stability."
source
-
With the first systems realized in 2006, Reis Robotics became market leader for photovoltaic module production lines
2007
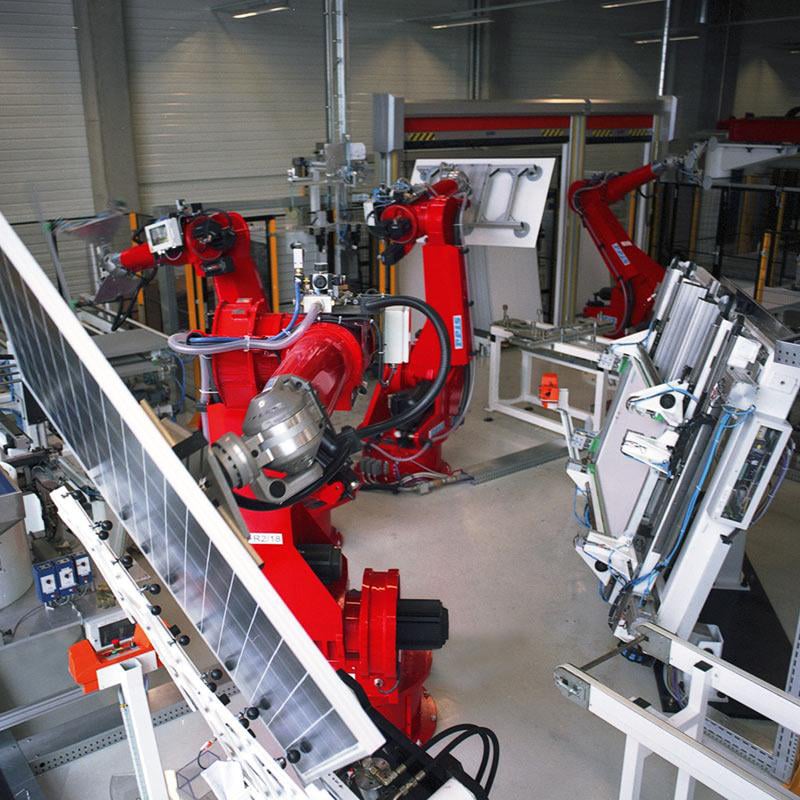 Since 2006 the new application field of photovoltaic became an important market for the use of robots
source
Since 2006 the new application field of photovoltaic became an important market for the use of robots
source -
KUKA, Germany, launched the first long range robot and heavy duty robot with a payload of 1,000 kg
2007
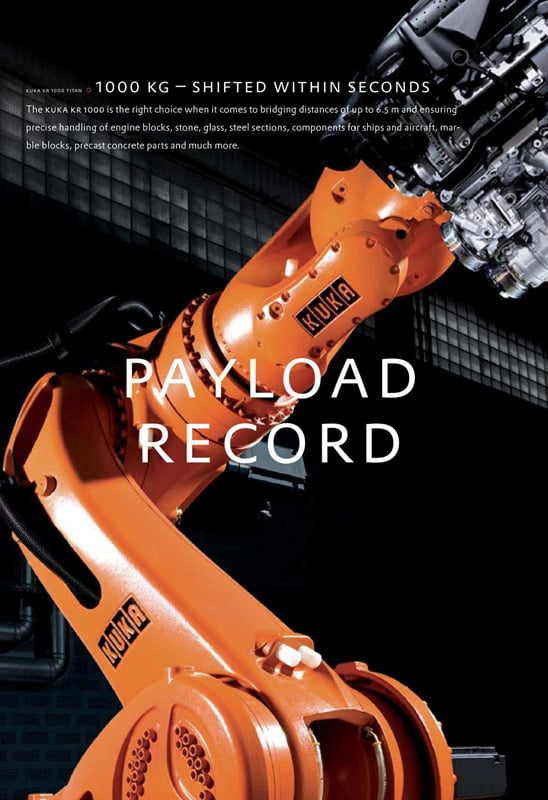 It expands the application possibilities of industrial robots and creates a new class of reach and payload combinations
source
It expands the application possibilities of industrial robots and creates a new class of reach and payload combinations
source -
Motoman, Japan, launched super speed arc welding robots which reduces cycle times by 15%, the fastest welding robots in existence in 2007
2007
 This speed is achieved with a 40% axis movement increase. Their design reduces air-cut time 30%.
source
This speed is achieved with a 40% axis movement increase. Their design reduces air-cut time 30%.
source -
Motoman, Japan, launched human sized single armed (7 axis) and dual armed robot (13 axis) with all of the supply cables hidden in the robot arm
2006
 It significantly increases the robot's freedom of movement. Robots with dual robot arms, offering human-like flexibility in their movements, are ideal for machine tending and assembly - even beverage serving. The Robot Bar grabs national attention.
source
It significantly increases the robot's freedom of movement. Robots with dual robot arms, offering human-like flexibility in their movements, are ideal for machine tending and assembly - even beverage serving. The Robot Bar grabs national attention.
source -
KUKA, Germany presents the first Light Weight Robot
2006
 Developed in cooperation with DLR, Institute of Robotics and Mechatronics, Germany, the outer structure of the KUKA lightweight robot is made of aluminum. It has a payload capacity of 7 kg and, thanks to its integrated sensors, is highly sensitive. This makes it ideally suited to handling and assembly tasks. Due to its low weight of just 16 kg - the first robot weighted two tons!, the robot is energy-efficient and portable and can perform a wide range of different tasks.
source
Developed in cooperation with DLR, Institute of Robotics and Mechatronics, Germany, the outer structure of the KUKA lightweight robot is made of aluminum. It has a payload capacity of 7 kg and, thanks to its integrated sensors, is highly sensitive. This makes it ideally suited to handling and assembly tasks. Due to its low weight of just 16 kg - the first robot weighted two tons!, the robot is energy-efficient and portable and can perform a wide range of different tasks.
source -
Comau, Italy, introduced the first Wireless Teach Pendant (WiTP)
2006
 All the traditional data communication/robot programming activities can be carried out without the restrictions caused by the cable connected to the Control Unit, but at the same time absolute safety is ensured.
source
All the traditional data communication/robot programming activities can be carried out without the restrictions caused by the cable connected to the Control Unit, but at the same time absolute safety is ensured.
source
-
Kiva Systems presents the DU 1000 warehouse logistics robot
2005
 Founded in 2003 as Distrobot System and soon renamed to Kiva Systems, the Drive Unit (DU) is a mobile robot that carries inventory shelves to human workers (instead of letting the worker go to the shelf) to pick items. The company and its technology were acquired by Amazon in 2012. Since then, Amazon uses the robot exclusively in their warehouses.
Photo: JOEL EDEN, Photography KIVA Systems
Founded in 2003 as Distrobot System and soon renamed to Kiva Systems, the Drive Unit (DU) is a mobile robot that carries inventory shelves to human workers (instead of letting the worker go to the shelf) to pick items. The company and its technology were acquired by Amazon in 2012. Since then, Amazon uses the robot exclusively in their warehouses.
Photo: JOEL EDEN, Photography KIVA Systems -
Motoman, Japan, introduced the improved robot control system 〈NX100〉 which provided the synchronized control of four robots, up to 38 axis
2004
 The NX100 programming pendant has a touch screen display and is based on WindowsCE operative system
source
The NX100 programming pendant has a touch screen display and is based on WindowsCE operative system
source -
Robocoaster, the first entertainment robot based on an articulated robot by KUKA, Germany
2003
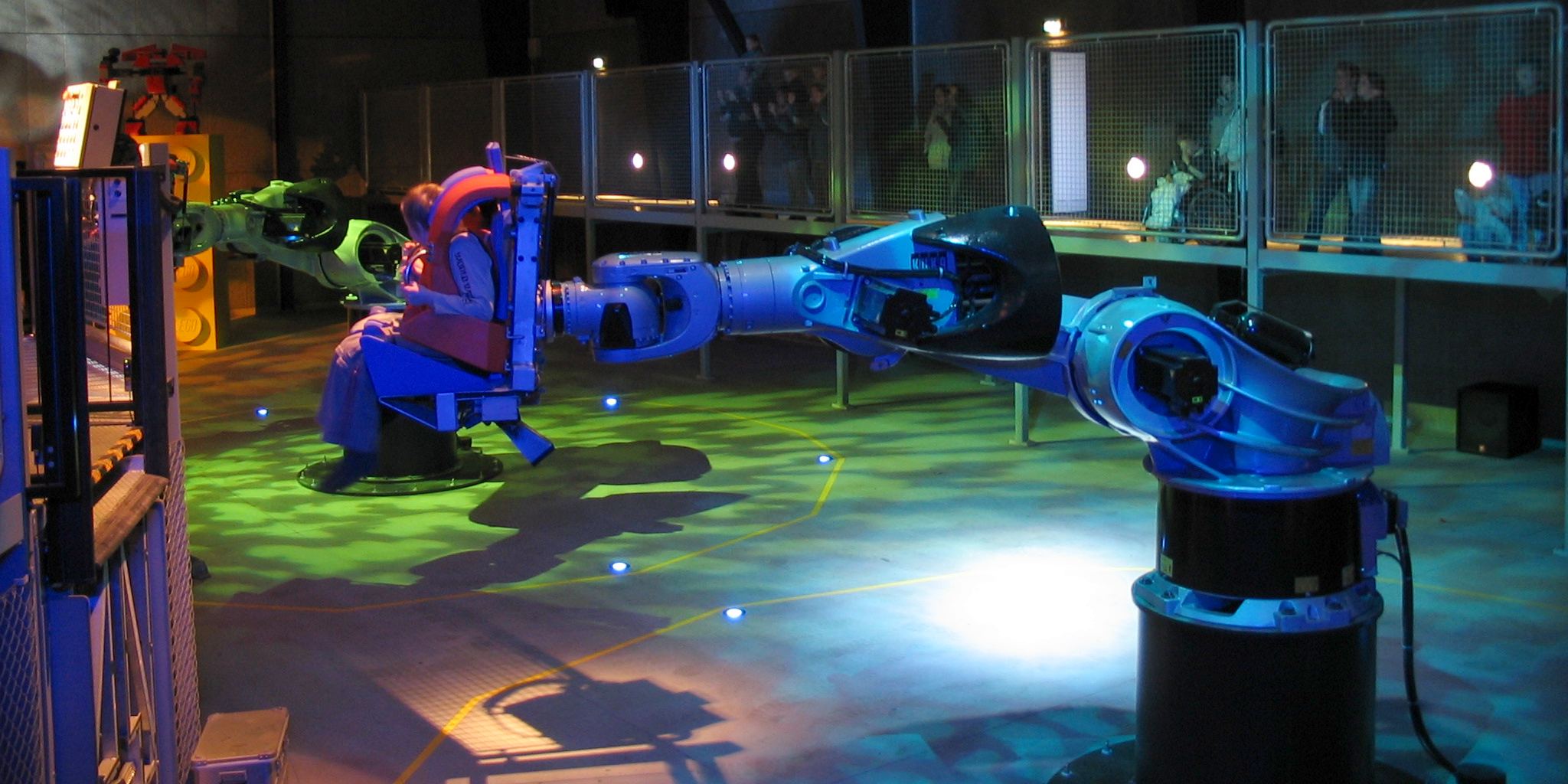 KUKA is the first robot manufacturer to bring people and robots into close contact: in the Robocoaster, the robot whirls passengers around in the air - an extraordinary entertainment ride for amusement parks and events.
source
KUKA is the first robot manufacturer to bring people and robots into close contact: in the Robocoaster, the robot whirls passengers around in the air - an extraordinary entertainment ride for amusement parks and events.
source -
Robots go to Mars
2003
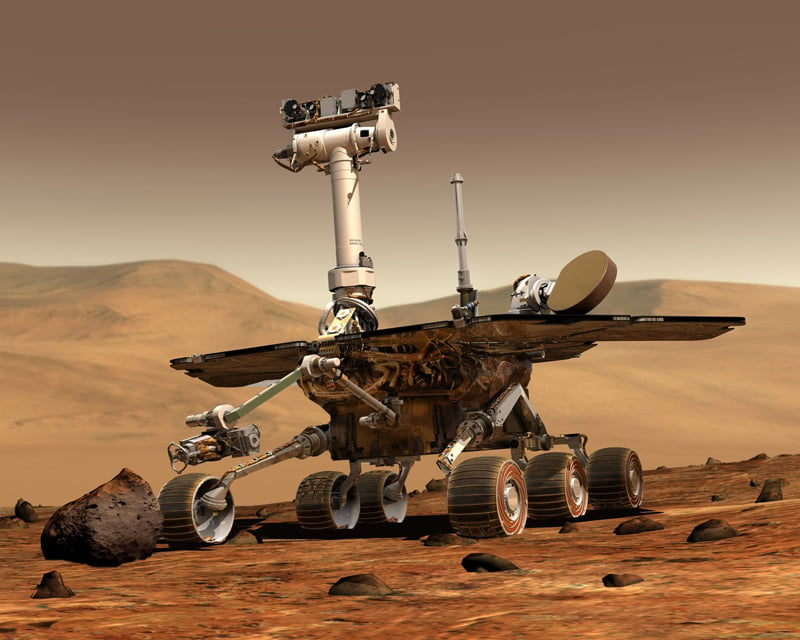 Mars Exploration Rover Mission is an ongoing robotic space mission involving two rovers, Spirit and Opportunity, exploring the planet Mars. It began in 2003 with the sending of the two rovers to explore the Martian surface and geology.
source
Mars Exploration Rover Mission is an ongoing robotic space mission involving two rovers, Spirit and Opportunity, exploring the planet Mars. It began in 2003 with the sending of the two rovers to explore the Martian surface and geology.
source -
Roomba - the first domestically available robot vacuum cleaner
2002
 Roomba (developed and commercialized by iRobot) was the first commercially available autonomous vacuum cleaner. It could detect dirty spots on the floor and avoid obstacles and stairs and returned to its charging dock when finished.
image © 2006 Larry D. Moore, CC BY-SA 4.0
Roomba (developed and commercialized by iRobot) was the first commercially available autonomous vacuum cleaner. It could detect dirty spots on the floor and avoid obstacles and stairs and returned to its charging dock when finished.
image © 2006 Larry D. Moore, CC BY-SA 4.0 -
Intuitive Surgical commercialized Da Vinci surgical robot
1999
 The da Vinci is a surgical robot designed for minimally invasive procedures. It has four arms equipped with surgical instruments and cameras that a physician controls remotely from a console. Source image © Intuitive Surgical
The da Vinci is a surgical robot designed for minimally invasive procedures. It has four arms equipped with surgical instruments and cameras that a physician controls remotely from a console. Source image © Intuitive Surgical -
Reis introduces integrated laser beam guiding within the robot arm
1999
 Reis Robotics receives patent on the integrated laser beam guiding through the robot arm and launches the RV6L-CO2 laser robot model. This technology replaces the need of an external beam guiding device thus allowing to use laser in combination with a robot at high dynamics and no collision contours
source
Reis Robotics receives patent on the integrated laser beam guiding through the robot arm and launches the RV6L-CO2 laser robot model. This technology replaces the need of an external beam guiding device thus allowing to use laser in combination with a robot at high dynamics and no collision contours
source -
First remote diagnosis for robots via Internet by KUKA, Germany
1999
-
Güdel, Switzerland, launched the “roboLoop” system, the only curved-track gantry and transfer system
1998
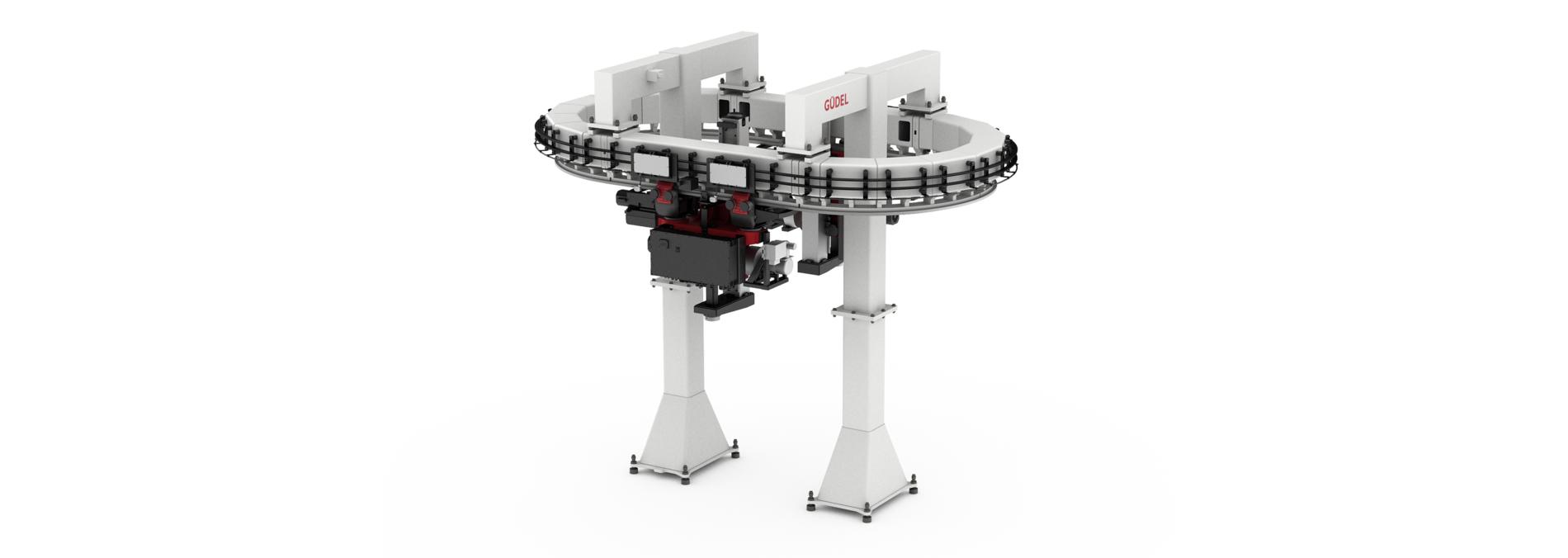 The roboLoop concept enables one or more robo-carriers to track curves and to circulate in a closed system, thereby creating new possibilities for factory automation.
source
The roboLoop concept enables one or more robo-carriers to track curves and to circulate in a closed system, thereby creating new possibilities for factory automation.
source
-
ABB, Sweden, developed the FlexPicker, the world’s fastest picking robot based on the delta robot developed by Reymond Clavel, Federal Institute of Technology of Lausanne (EPFL)
1998
 It was able to pick 120 objects a minute or pick and release at a speed of 10 meters per second, using image technology.
source
It was able to pick 120 objects a minute or pick and release at a speed of 10 meters per second, using image technology.
source
-
Reis Robotics launches the 5. robot control generation ROBOTstar V, with one of the shortest interpolation cycle times for robot controls
1998
Reis Robotics launches the 5. robot control generation ROBOTstar V, with one of the shortest interpolation cycle times for robot controls source
-
KUKA, Germany, launched the first PC-based robot control system
1996
 It was possible, for the first time, to move robots in real time using a 6D mouse on an operator control device. This teach pendant featured a Windows user interface for control and programming tasks.
source
It was possible, for the first time, to move robots in real time using a 6D mouse on an operator control device. This teach pendant featured a Windows user interface for control and programming tasks.
source -
Motoman introduced the first robot control system 〈MRC〉 which provided the synchronized control of two robots
1994
 MRC also made it possible to edit robot jobs from an ordinary PC. MRC offered the ability to control up to 21 axes. It could also synchronize the motions of two robots.
source
MRC also made it possible to edit robot jobs from an ordinary PC. MRC offered the ability to control up to 21 axes. It could also synchronize the motions of two robots.
source -
Demaurex, Switzerland, sold its first Delta robot packaging application to Roland
1992
 The first application was a landmark installation of 6 robots loading pretzels into blister trays. It was based on the delta robot developed by Reymond Clavel, Federal Institute of Technology of Lausanne (EPFL).
source
The first application was a landmark installation of 6 robots loading pretzels into blister trays. It was based on the delta robot developed by Reymond Clavel, Federal Institute of Technology of Lausanne (EPFL).
source -
ABB, Sweden, launched an open control system 〈S4〉
1992
 The S4 controller was designed to improve two areas of critical importance to the user; the man-machine interface and the robot's technical performance.
source
The S4 controller was designed to improve two areas of critical importance to the user; the man-machine interface and the robot's technical performance.
source
-
Wittmann, Austria introduced the CAN-Bus control for robots
1992
"In practical terms, these features can add up to faster operations for robot workcells, which is why Wittmann Robot and Automation Systems Inc. of Torrington, Conn., adopted CANbus for all its CNC robots 18 months ago. Sales manager Ken Heyse explains that Wittmann's previous CNC controller, which used a single microprocessor for all robot and peripheral functions, had to perform various subroutines sequentially, potentially interrupting the operation of the robot. CANbus, by contrast, handles data locally. The robot itself, its pendant, stackers, and other downstream equipment all process data in their own microprocessors. Only then does a master controller coordinate all those efforts. In Wittmann's CANbus CNC controls, all the robot programs and related subroutines run simultaneously on the different microprocessors. The result, Heyse says, is a speedier workcell." source
-
The first AMR to be used in a hospital
1988
 One of the first autonomous mobile robots (AMR) - a robot that can plan and execute its own path to its destination - was developed by Joseph Engelberger’s company Transitions Research Corporation (later renamed HelpMate Robotics Inc). The robot called Helpmate was used as a courier to transport objects within hospitals. The first one was purchased and deployed by a hospital in Danbury, Connecticut (USA), but the robot was soon used in more than 100 different hospitals around the world. image © Kaluga.2012 (scan from print), CC BY-SA 3.0, via Wikimedia Commons
One of the first autonomous mobile robots (AMR) - a robot that can plan and execute its own path to its destination - was developed by Joseph Engelberger’s company Transitions Research Corporation (later renamed HelpMate Robotics Inc). The robot called Helpmate was used as a courier to transport objects within hospitals. The first one was purchased and deployed by a hospital in Danbury, Connecticut (USA), but the robot was soon used in more than 100 different hospitals around the world. image © Kaluga.2012 (scan from print), CC BY-SA 3.0, via Wikimedia Commons -
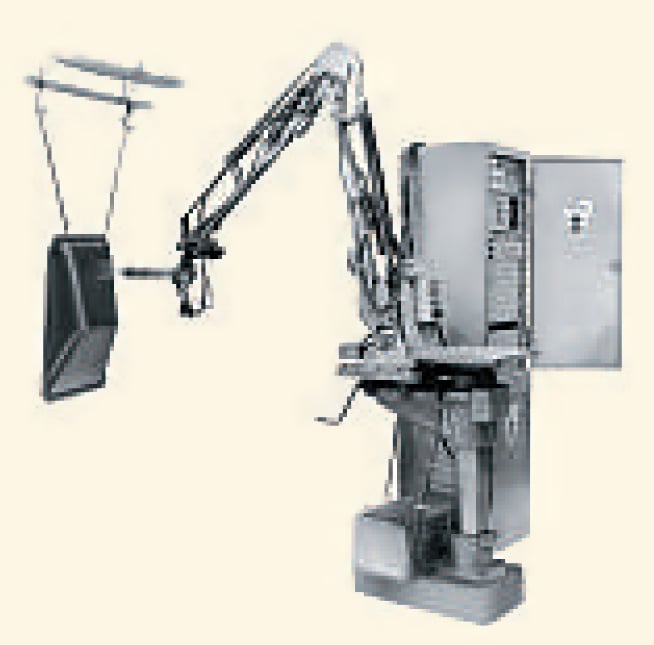
ABB, Sweden produced the fastest assembly robot (IRB 1000)
1984
 It was equipped with a vertical arm, a sort of hanging pendulum robot. The robot could work quickly across a large area without the need to traverse. It was as much as 50% faster than conventional arm robots. (Lars Westerlund, The Extended Arm of Man)
source
It was equipped with a vertical arm, a sort of hanging pendulum robot. The robot could work quickly across a large area without the need to traverse. It was as much as 50% faster than conventional arm robots. (Lars Westerlund, The Extended Arm of Man)
source -
Adept, USA, introduced the AdeptOne, first direct-drive SCARA robot
1984
 Electric-drive motors connected directly to the arms eliminating the need for intermediate gear or chain system. The simplicity of the mechanism made AdeptOne robots very robust in continuous industrial automation applications, while maintaining high accuracy.
source
Electric-drive motors connected directly to the arms eliminating the need for intermediate gear or chain system. The simplicity of the mechanism made AdeptOne robots very robust in continuous industrial automation applications, while maintaining high accuracy.
source -
Flexible Automated Assembly Lines
1983
Westinghouse issues a research report on APAS, or adaptable-programming assembly systems, a pilot project for using robots in a more flexible automated assembly line environment. The approach uses machine vision in the positioning, orienting and inspection of the component parts. source
-
IBM develops a programming language for robotics, AML
1982
 AML (A Manufacturing Language), a powerful, easily used programming language was developed by IBM, USA, specifically for robotic applications. Using an IBM Personal Computer manufacturing engineers could quickly and easily create application programs.
source
AML (A Manufacturing Language), a powerful, easily used programming language was developed by IBM, USA, specifically for robotic applications. Using an IBM Personal Computer manufacturing engineers could quickly and easily create application programs.
source -
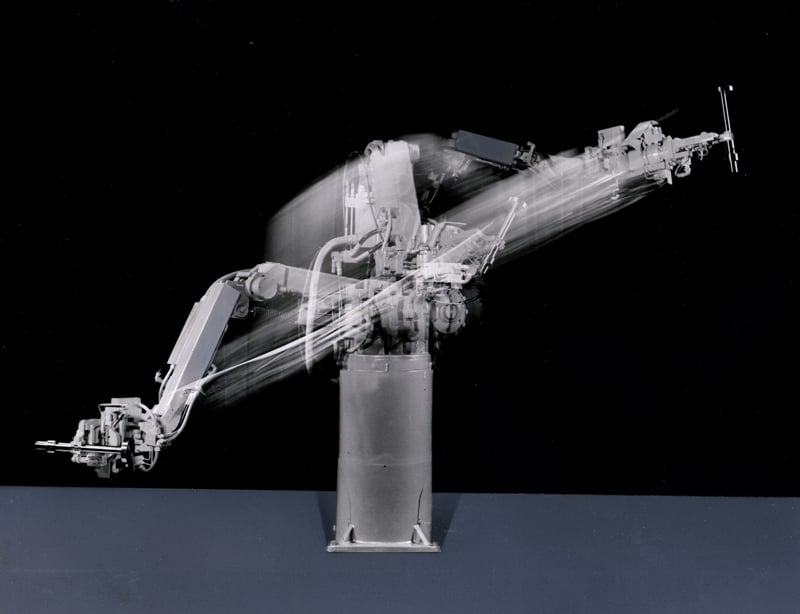
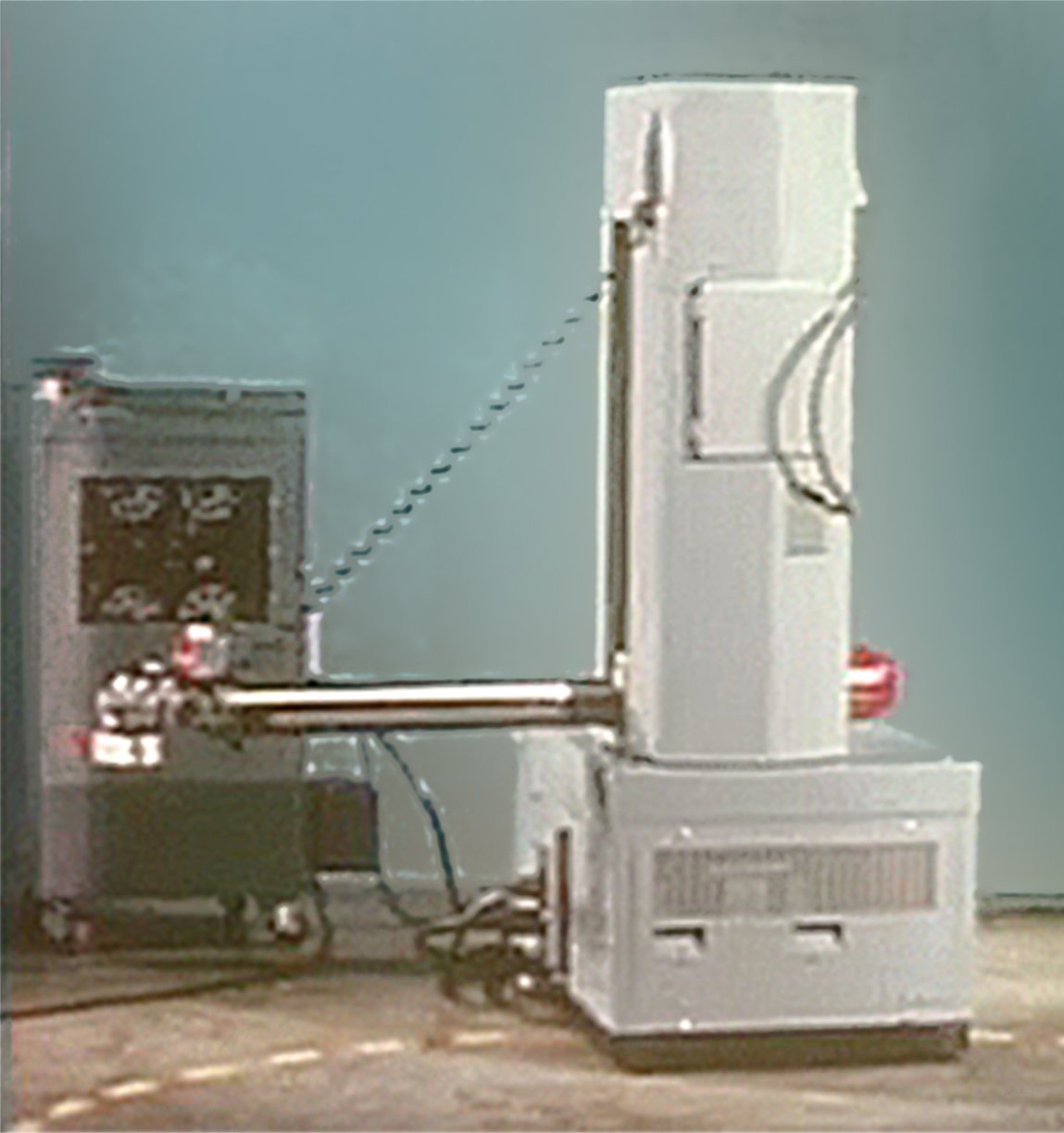
PaR Systems, USA, introduced its first industrial gantry robot
1981
 Gantry robots provided a much larger range of motion than pedestal robots of the day, and could replace several robots. (PaR 50th Anniversary, 2010).
source
Gantry robots provided a much larger range of motion than pedestal robots of the day, and could replace several robots. (PaR 50th Anniversary, 2010).
source -
GM installed “CONSIGHT”, a machine vision system
1981
source The first production implementation of the General Motors Consight vision system at the St. Catherines, Ontario, foundry is successfully sorting up to six different castings at up to 1,400 an hour from a belt conveyor using three industrial robots in a harsh manufacturing environment.
The first production implementation of the General Motors Consight vision system at the St. Catherines, Ontario, foundry is successfully sorting up to six different castings at up to 1,400 an hour from a belt conveyor using three industrial robots in a harsh manufacturing environment. -
First use of machine vision
1980
At the University of Rhode Island, USA, a bin-picking robotics system demonstrated the picking of parts in random orientation and positions out of a bin.
-
Nachi, Japan, developed the first motor-driven robots
1979
 The spot-welding robots ushered in a new era of electric driven robots, replacing the previous era of hydraulic drive.
source
The spot-welding robots ushered in a new era of electric driven robots, replacing the previous era of hydraulic drive.
source -
First six-axis robot with own control system RE 15 by Reis, Obernburg, Germany
1979
-
Hiroshi Makino, University of Yamanashi, Japan, developed the SCARA-Robot (Selective Compliance Assembly Robot Arm)
1978
By virtue of the SCARA's parallel-axis joint layout, the arm is slightly compliant in the X-Y direction but rigid in the 'Z' direction, hence the term: Selective Compliant. This is advantageous for many types of assembly operations, i.e., inserting a round pin in a round hole without binding. The second attribute of the SCARA is the jointed two-link arm layout similar to our human arms, hence the often-used term, Articulated. This feature allows the arm to extend into confined areas and then retract or "fold up" out of the way. This is advantageous for transferring parts from one cell to another or for loading/ unloading process stations that are enclosed. In 1981, SCARA robots were launched by by Sankyo Seiki, Japan and Hirata, Japan. source
-
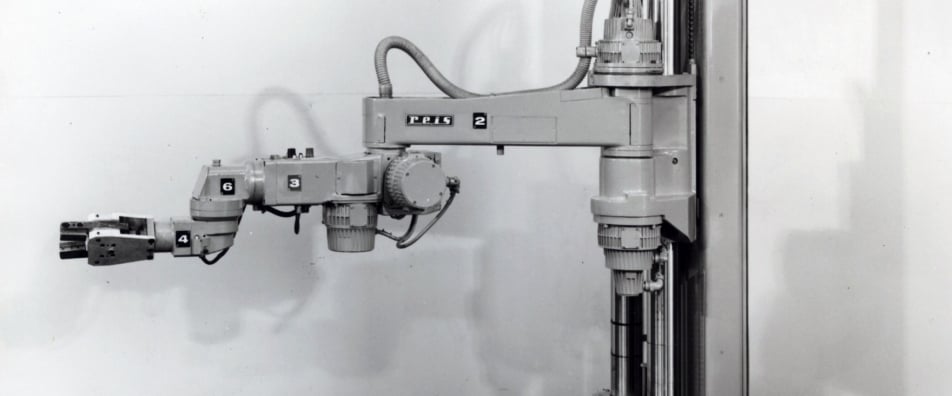
Programmable Universal Machine for Assembly (PUMA) was developed by Unimation/Vicarm; USA, with support from General Motors
1978
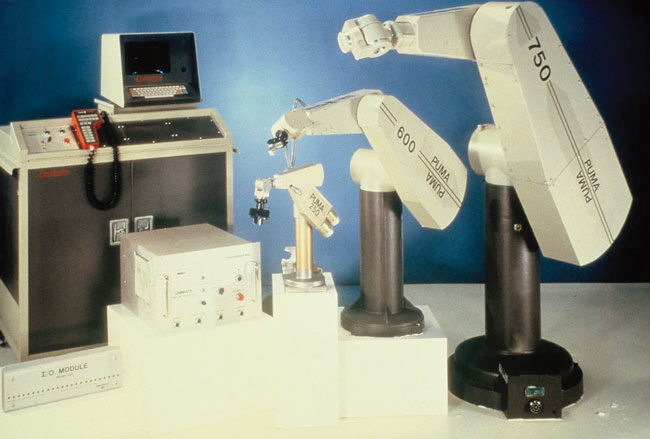 GM had concluded that 90 percent of all parts handled during assembly weighed five pounds or less. The PUMA was adapted to GM specifications for a small parts handling line robot that maintained the same space intrusion of a human operator.
GM had concluded that 90 percent of all parts handled during assembly weighed five pounds or less. The PUMA was adapted to GM specifications for a small parts handling line robot that maintained the same space intrusion of a human operator. -
Hitachi (Japan) developed an assembly cell to assemble vacuum cleaners with 8 TV cameras and two robot arms
1977
-
Robots in space
1976
 Robot arms are used on Viking 1 and 2 space probes.
source
Robot arms are used on Viking 1 and 2 space probes.
source -
Hitachi (Japan) developed the first sensor based arc welding robot “Mr. AROS”
1975
 The robot is equipped with microprocessors and gap sensors to correct arc welding path by detecting precise location of workpieces. source
The robot is equipped with microprocessors and gap sensors to correct arc welding path by detecting precise location of workpieces. source -
ABB developed an industrial robot with a payload up to 60 kg
1975
 This met the demand of the automotive industry for more payload, more flexibility. The robot, called the IRB60, was first delivered to Saab in Sweden for welding car bodies.
source
This met the demand of the automotive industry for more payload, more flexibility. The robot, called the IRB60, was first delivered to Saab in Sweden for welding car bodies.
source -
The Olivetti “SIGMA” a cartesian-coordinate robot, is one of the first used in assembly applications
1975
 The Olivetti SIGMA robot was used in Italy for assembly operations with two hands.
source
The Olivetti SIGMA robot was used in Italy for assembly operations with two hands.
source -
Hitachi (Japan) developed the first precision insertion control robot “HI-T-HAND Expert”
1974
 This robot had a flexible wrist mechanism and a force feed-back control system. Therefore it could insert mechanical parts with a clearance of about 10 micron.
This robot had a flexible wrist mechanism and a force feed-back control system. Therefore it could insert mechanical parts with a clearance of about 10 micron. -
The first fully electric, microprocessor-controlled industrial robot, IRB 6 from ASEA
1974
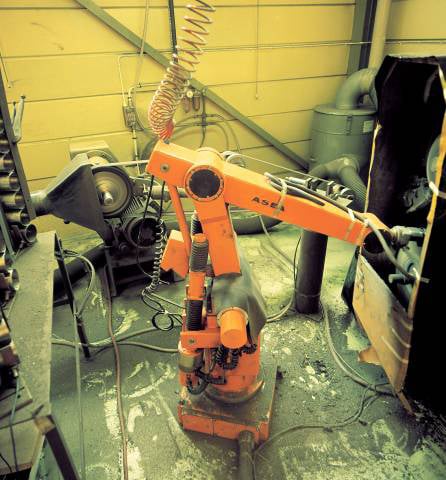 With anthropomorphic design, its arm movement mimicked that of a human arm, with a payload of 6kg and 5 axis. The S1 controller was the first to use a intel 8 bit microprocessor. The memory capacity was 16KB. The controller had 16 digital I/O and was programmed trough 16 keys and a four digit LED display. The first model, IRB 6, was developed in 1972-1973 on assignment by the ASEA CEO Curt Nicolin and was shown for the first time at the end of August 1973. It was acquired by Magnussons in Genarp to wax and polish stainless steel tubes bent at 90° angles.
source
With anthropomorphic design, its arm movement mimicked that of a human arm, with a payload of 6kg and 5 axis. The S1 controller was the first to use a intel 8 bit microprocessor. The memory capacity was 16KB. The controller had 16 digital I/O and was programmed trough 16 keys and a four digit LED display. The first model, IRB 6, was developed in 1972-1973 on assignment by the ASEA CEO Curt Nicolin and was shown for the first time at the end of August 1973. It was acquired by Magnussons in Genarp to wax and polish stainless steel tubes bent at 90° angles.
source
-
The first arc welding robots go to work in Japan
1974
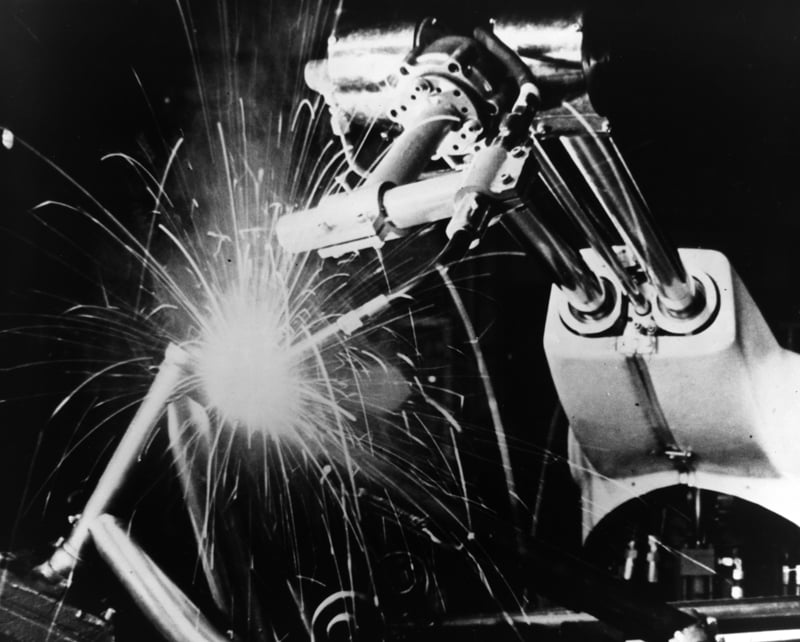 In Japan, Kawasaki built on the Unimate design to create an arc-welding robot, used to fabricate their motorcycle frames. They also developed touch and force-sensing capabilities in their Hi-T-Hand robot, enabling the robot to guide pins into holes at a rate of one second per pin.
source
In Japan, Kawasaki built on the Unimate design to create an arc-welding robot, used to fabricate their motorcycle frames. They also developed touch and force-sensing capabilities in their Hi-T-Hand robot, enabling the robot to guide pins into holes at a rate of one second per pin.
source -
The first minicomputer-controlled industrial robot comes to market
1974
 The first commercially available minicomputer-controlled industrial robot was developed by Richard Hohn for Cincinnati Milacron Corporation. The robot was called the T3, The Tomorrow Tool.
The first commercially available minicomputer-controlled industrial robot was developed by Richard Hohn for Cincinnati Milacron Corporation. The robot was called the T3, The Tomorrow Tool. -
Hitachi (Japan) developed the automatic bolting robot for concrete pile and pole industry
1973
 This robot was the first industrial robot with dynamic vision sensors for moving objects. It recognized bolts on a mold while it is moving and fastened/loosened the bolts in synchronization with the mold motion.
This robot was the first industrial robot with dynamic vision sensors for moving objects. It recognized bolts on a mold while it is moving and fastened/loosened the bolts in synchronization with the mold motion. -
Scheinemann started production of Vicarm/Stanford arm at Vicarm Inc, USA
1973
 The Stanford arm was a robotic arm that performed small-parts assembly using feedback from touch and pressure sensors. Professor Scheinman, the developer of the Stanford Arm, formed Vicarm Inc. to market a version of the arm for industrial applications. The new arm was controlled by a minicomputer.
The Stanford arm was a robotic arm that performed small-parts assembly using feedback from touch and pressure sensors. Professor Scheinman, the developer of the Stanford Arm, formed Vicarm Inc. to market a version of the arm for industrial applications. The new arm was controlled by a minicomputer. -
First robot to have six electromechanically driven axes
1973
 KUKA moves from using Unimate robots to developing their own robots. Their robot, the Famulus was the first robot to have six electromechanically driven axes.
source
KUKA moves from using Unimate robots to developing their own robots. Their robot, the Famulus was the first robot to have six electromechanically driven axes.
source -
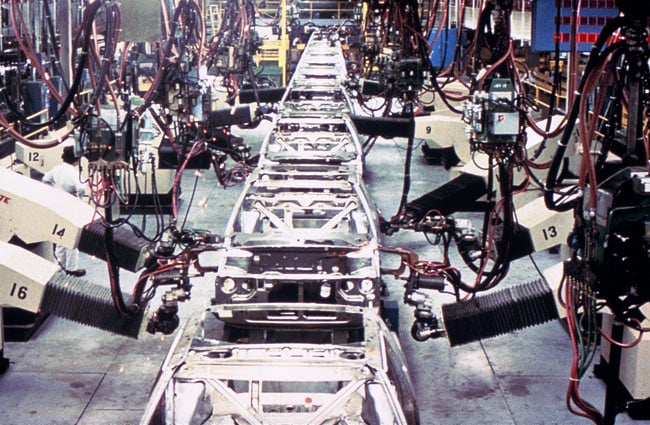
Robot production lines installed in Europe
1972
 FIAT in Italy and Nissan in Japan installed production lines of spot-welding robots.
source
FIAT in Italy and Nissan in Japan installed production lines of spot-welding robots.
source -
Robot vision, for mobile robot guidance, is demonstrated at the SRI with Shakey
1972
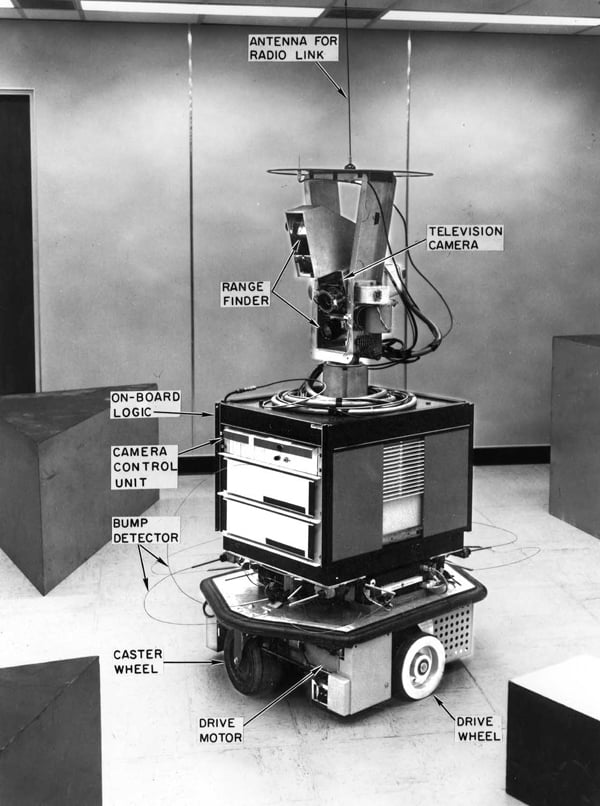 Robot vision, for mobile robot guidance, is demonstrated at the Stanford Research Institute (SRI). Shakey the robot was developed at the Artificial Intelligence Center of SRI between 1966 and 1972. It was the first robot capable of intelligently navigating its environment with robot vision and helped to lay the groundwork for today’s Autonomous Mobile Robots (AMR). It was also the first robot to use artificial intelligence. Shakey itself remained a research tool and never was commercialized. © Photo SRI International Source
Robot vision, for mobile robot guidance, is demonstrated at the Stanford Research Institute (SRI). Shakey the robot was developed at the Artificial Intelligence Center of SRI between 1966 and 1972. It was the first robot capable of intelligently navigating its environment with robot vision and helped to lay the groundwork for today’s Autonomous Mobile Robots (AMR). It was also the first robot to use artificial intelligence. Shakey itself remained a research tool and never was commercialized. © Photo SRI International Source -
The Japanese Robot Association (JIRA, later JARA) was established
1971
This was the first national robot association. The Japan Robot Association was formed in 1971 as the Industrial Robot Conversazione, a voluntary organization. The Conversazione was reorganized into the Japan Industrial Robot Association (JIRA) in 1972, and the Association was formally incorporated in 1973. source
-
First production line with hydraulic actuated robots at Daimler Benz, Sindelfingen
1971
 For Daimler-Benz, KUKA builds Europe's first welding transfer line with robots in 1971.
source
For Daimler-Benz, KUKA builds Europe's first welding transfer line with robots in 1971.
source -
Hitachi (Japan) developed the world’s first vision-based fully-automatic intelligent robot that assembles objects from plan drawings
1969
 The robot could build blocks based on information created from a direct visual image of assembly plan drawings.
The robot could build blocks based on information created from a direct visual image of assembly plan drawings. -
Unimate robots enter Japanese market
1969
 Unimation signs a licensing agreement with Kawasaki Heavy Industries to manufacture and market Unimate robots for the Asian market. Kawasaki regarded the development and production of labor-saving machines and systems as an important mission, and became Japan's pioneer in the industrial robot field. In 1969, the company succeeded in developing the Kawasaki-Unimate 2000, the first industrial robot ever produced in Japan.
source
Unimation signs a licensing agreement with Kawasaki Heavy Industries to manufacture and market Unimate robots for the Asian market. Kawasaki regarded the development and production of labor-saving machines and systems as an important mission, and became Japan's pioneer in the industrial robot field. In 1969, the company succeeded in developing the Kawasaki-Unimate 2000, the first industrial robot ever produced in Japan.
source -
Trallfa, Norway, offers the first commercial painting robot
1969
 The robots were developed for in-house use in 1967 to spray paint wheelbarrows during a Norwegian labor shortage.
source
The robots were developed for in-house use in 1967 to spray paint wheelbarrows during a Norwegian labor shortage.
source -
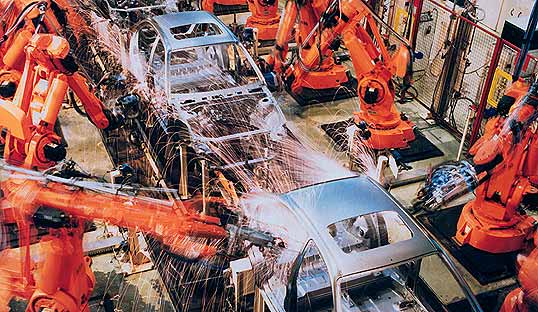
GM installed the first spot-welding robots at its Lordstown assembly plant
1969
 The Unimation robots boosted productivity and allowed more than 90 percent of body welding operations to be automated vs. only 20 percent to 40 percent at traditional plants, where welding was a manual, dirty and dangerous task dominated by large jigs and fixtures.
source
The Unimation robots boosted productivity and allowed more than 90 percent of body welding operations to be automated vs. only 20 percent to 40 percent at traditional plants, where welding was a manual, dirty and dangerous task dominated by large jigs and fixtures.
source -
The octopus-like Tentacle Arm was developed by Marvin Minsky
1968
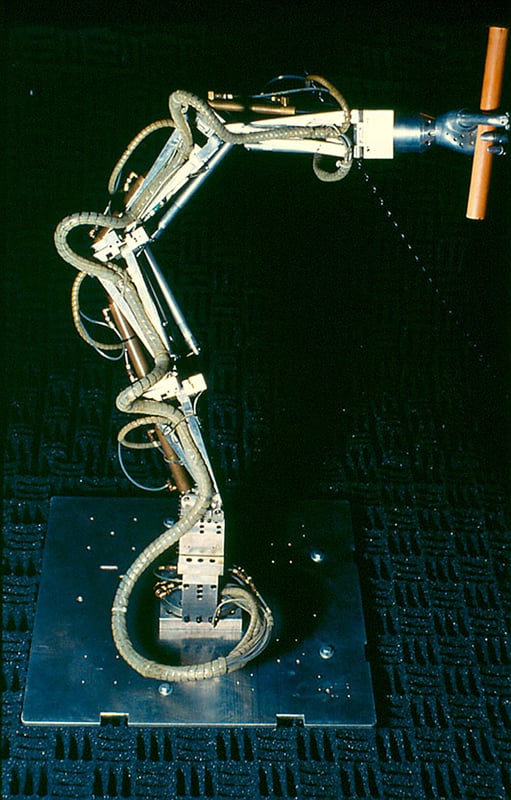 The octopus-like Tentacle Arm was developed by Marvin Minsky
source
The octopus-like Tentacle Arm was developed by Marvin Minsky
source -
The first industrial robot sold in Europe
1967
 The first industrial robot sold in Europe, a Unimate, was installed at Metallverken, Uppsland Väsby, Sweden
The first industrial robot sold in Europe, a Unimate, was installed at Metallverken, Uppsland Väsby, Sweden -
The first cylindrical robot, the Versatran from AMF
1962
 6 Versatran robots were installed by American Machine and Foundry (AMF) at the Ford factory in Canton, USA. It was named the Versatran from the words "versatile transfer".
source
6 Versatran robots were installed by American Machine and Foundry (AMF) at the Ford factory in Canton, USA. It was named the Versatran from the words "versatile transfer".
source
-
Unimation installed the first industrial robot at GM
1961
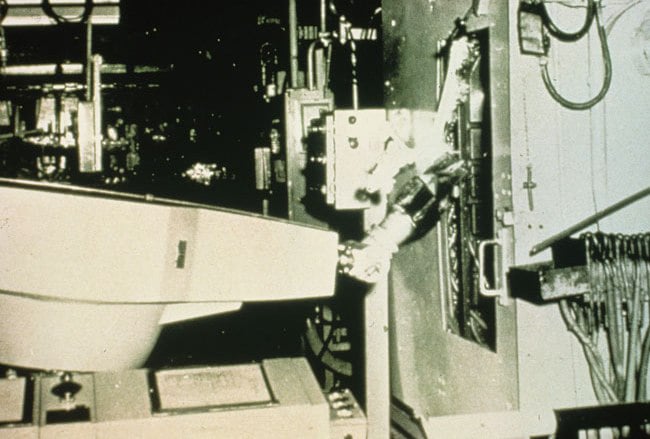 The world's first industrial was robot used on a production line at the GM Ternstedt plant in Trenton, NJ, which made door and window handles, gearshift knobs, light fixtures and other hardware for automotive interiors. Obeying step-by-step commands stored on a magnetic drum, the Unimate robot's 4,000 pound arm sequenced and stacked hot pieces of diecast metal. The robot cost US$ 65,000 to make but Unimation sold it for US $18,000.
The world's first industrial was robot used on a production line at the GM Ternstedt plant in Trenton, NJ, which made door and window handles, gearshift knobs, light fixtures and other hardware for automotive interiors. Obeying step-by-step commands stored on a magnetic drum, the Unimate robot's 4,000 pound arm sequenced and stacked hot pieces of diecast metal. The robot cost US$ 65,000 to make but Unimation sold it for US $18,000. -
Development of the first industrial robot by George Devol and Joseph Engelberger
1959
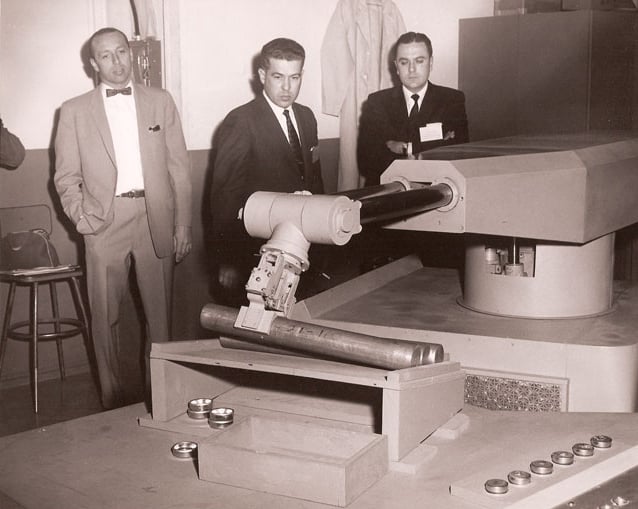 It weighed two tons and was controlled by a program on a magnetic drum. They used hydraulic actuators and were programmed in joint coordinates, i.e. the angles of the various joints were stored during a teaching phase and replayed in operation. They were accurate to within 1/10,000 of an inch.
It weighed two tons and was controlled by a program on a magnetic drum. They used hydraulic actuators and were programmed in joint coordinates, i.e. the angles of the various joints were stored during a teaching phase and replayed in operation. They were accurate to within 1/10,000 of an inch.

IFR Secretariat
The General Secretariat is responsible for the daily management of IFR and the coordination of all major activities, events and collaboration. The General Secretariat handles all questions regarding IFR membership.

Dr. Susanne Bieller
IFR General Secretary
Phone: +49 69-6603-1502
E-Mail: secretariat(at)ifr.org

Silke Lampe
Communication Manager
Phone: +49 69-6603-1697
E-Mail: secretariat(at)ifr.org
Credits · Legal Disclaimer · Privacy Policy ·World Robotics Terms of Usage · © IFR 2026