In the field of robotics, bin-picking is a challenging task. And critically speaking, the spread of bin-picking is still far behind expectations. AI offers promising technologies to push bin-picking applications forward.

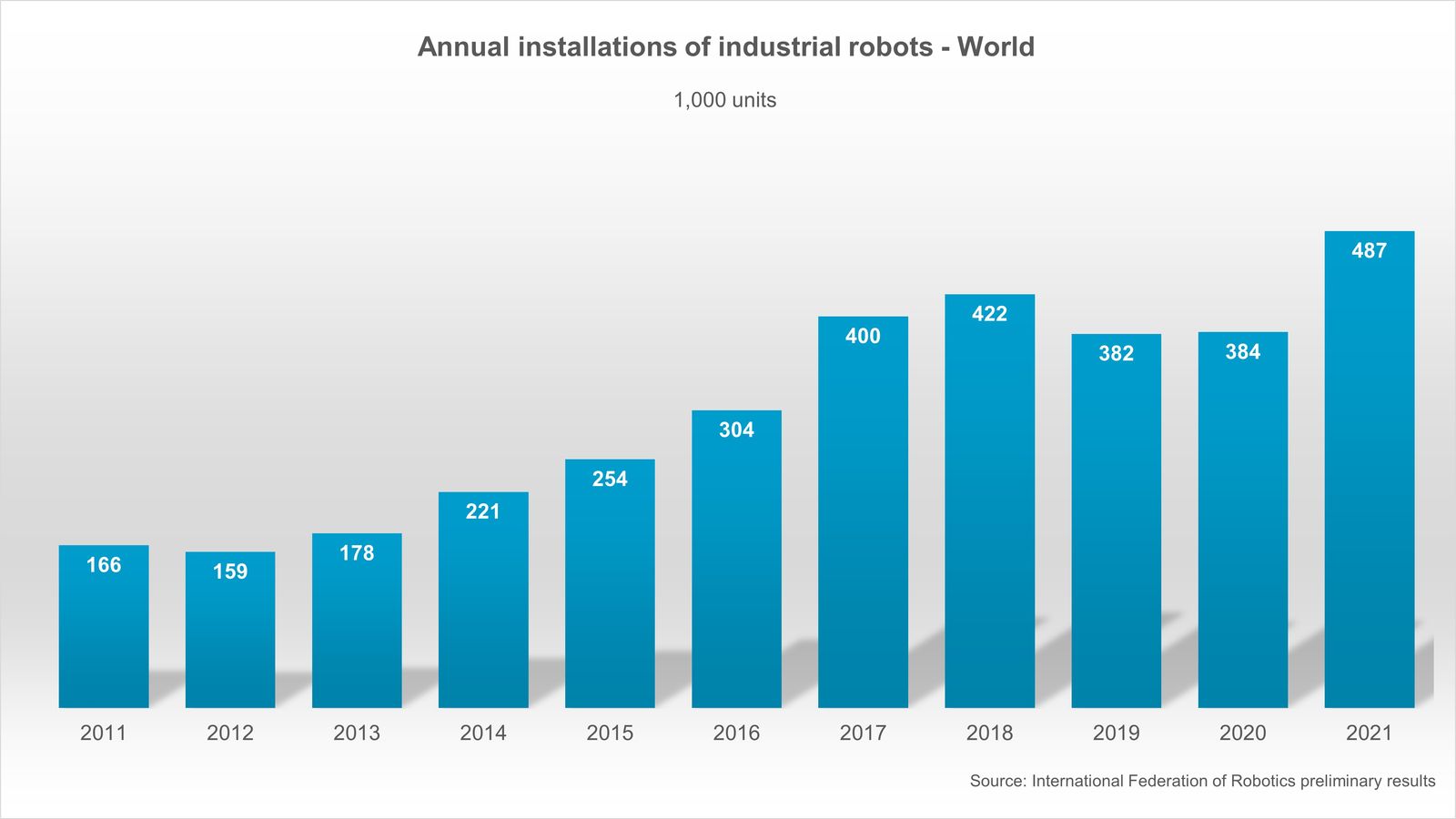
Every year, more than 200,000 new robots are installed worldwide for handling. Of these, only a fraction in the per mille range performs bin-picking despite the task’s high potential. One reason for the little spread: Bin-picking cells are the first station of an interlinked production or assembly line. The balancing of such a line is based on the fact that each station provides a guaranteed output. Bin-picking brings along two uncertainties: It is often not guaranteed that the box can be emptied. Furthermore, the cycle time also increases significantly with increasing crate emptying. These uncertainties are often the result of suboptimal parameters which are difficult to set for non-experts.

For this reason, Fraunhofer IPA and Liebherr-Verzahntechnik GmbH, who have been working together on reliable, high-performance bin-picking solutions since 2012, are using artificial intelligence to automate the parametrization of new parts. AI based optimization methods are used to determine the best parameters for the localization of a given part. The parameters are rated based on several factors like the number of correctly detected parts or the accuracy. This automatic approach reduces the time needed for a manual setup by the operator and leads to a reliable detection of parts and therefore to a robust bin-picking process.