YuMi® manufacturing sockets at ABB’s plant in the Czech Republic
Cooperation
Dec 19, 2018 — Designed for use in Small Parts Assembly, YuMi will work side-by-side with a human counterpart at ABB Elektro-Praga on its socket lid assembly line.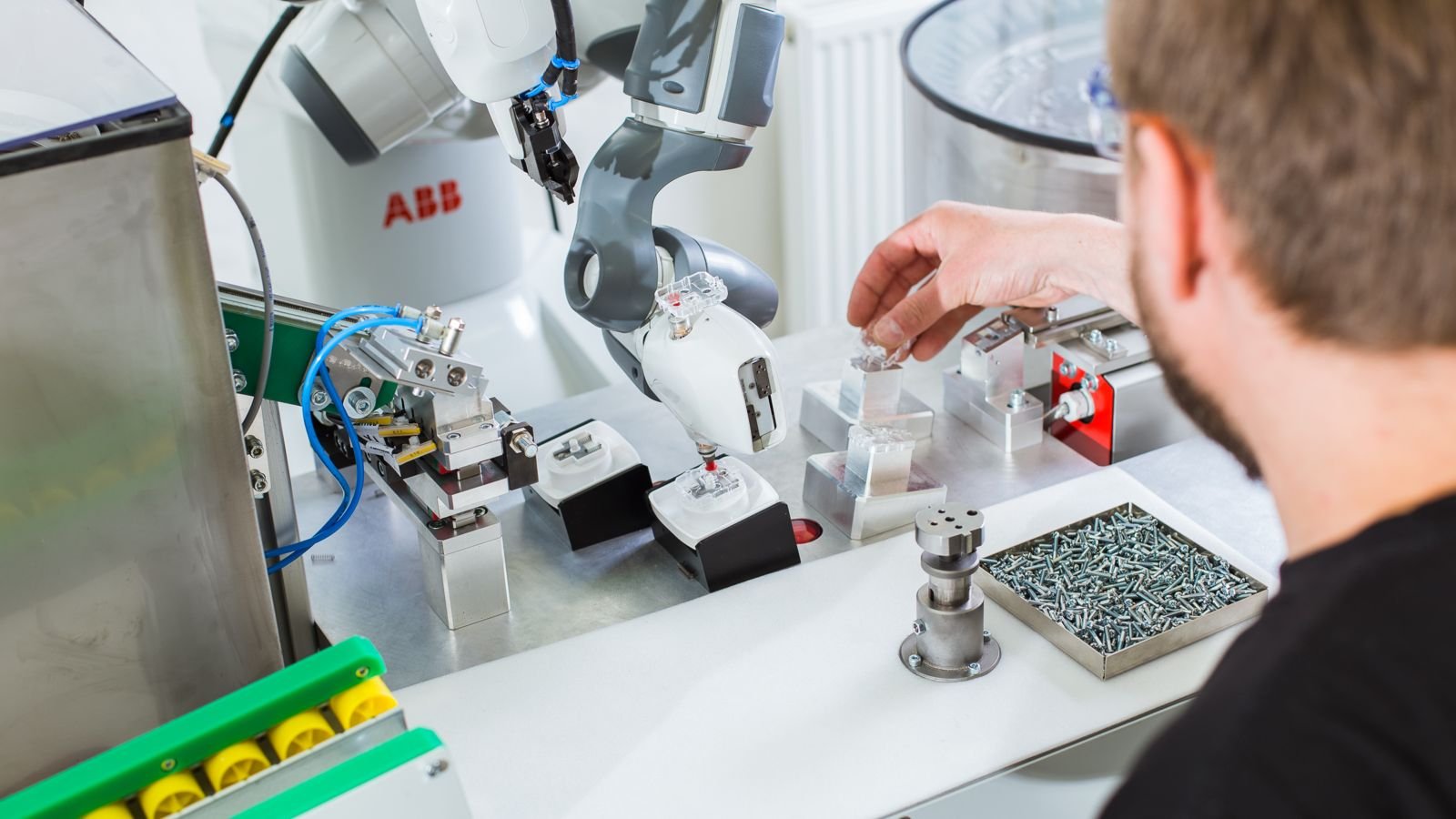
Thanks to its inherently safe design, the collaborative dual arm robot solution will ensure the safety of those around it and elevate the nature of work at the plant by performing repetitive tasks to perfection.
“We are very excited to add YuMi to our production line. The robot solution brings unique advantages to this assembly process including greater flexibility, improved quality, increased safety and better workplace ergonomics,” says Tanja Vainio, Country Manager, ABB Czech Republic. “YuMi’s outstanding features for collaborative small parts assembly is the perfect solution for Elektro-Praga which wanted an easy to use robotic solution capable of working side-by-side with humans on similar tasks.”
YuMi will utilize connected services developed by ABB which will monitor the robot during production and operation. The ability to monitor YuMi in this manner will increase its efficiency, reduces service costs, secure uptime and extend its lifetime. Thanks to these diagnostic technologies a once reactive approved to fleet management is replaced by a predictive, proactive, and immediate one. Prior to the advent of the Internet of Things Services and People, robots were maintained according to a schedule.
“YuMi, short for you and me, will open up more opportunities for Czech businesses like Elektro-Praga to improve their productivity. Task sharing between humans and robots is a great way to accelerate production,” said Vainio.
YuMi, the world’s first truly collaborative dual arm robot, represents another step in ABB’s Next Level strategy aimed at accelerating sustainable value creation. The strategy is building on ABB’s three focus areas of profitable growth, relentless execution and business-led collaboration.
Assembly application
The collaborative workstation consists of YuMi, a human operator, sensor devices, conveyors, vibration feeders, and a spring disentangling system. YuMi handles springs, child locks and child lock covers. The assembly process is triggered by the human operator who places two socket lids and two child lock covers in front of the robot.

YuMi uses its suction grippers to grasp the child locks which it then places into prepared socket lids. Next, YuMi takes springs from the feeder (two pieces per each socket), and puts them into the space between the child lock and the socket lid. The robot then grasps the child lock cover with its gripper and places it on the socket lid which is equipped with a child lock and spring. The socket assembly is completed by pushing the child lock cover into the socket lid. The operator inserts a screw into the lid and sends the completed socket for packaging. In addition to parts handling, the human operator is responsible for supervision of the overall assembly process.




