IFR Executive Roundtable at Automate show
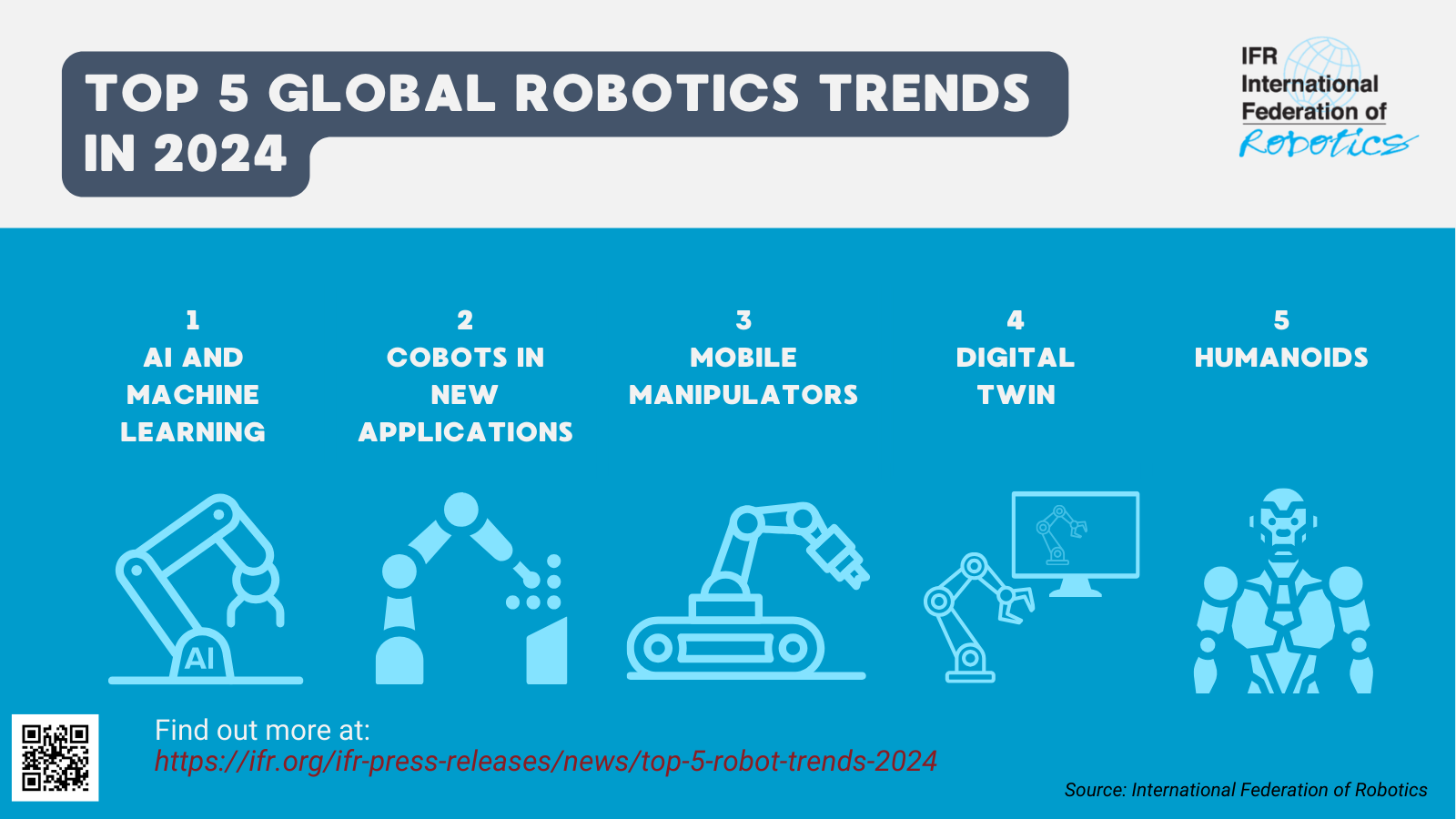
The Trends & Technologies Driving the Industry in 2024
Chicago, Apr 24, 2024 — The IFR Executive Roundtable will be held at the Automate show in Chicago on May 8, 2024.

Join us for this discussion with top leaders from the robotics industry as we explore the latest economic trends, cutting-edge technologies, business opportunities, and strategic insights that are driving automation forward.
Main theme of the panel discussion: “The Robotics Executive Roundtable: The Trends & Technologies Driving the Industry in 2024”.
On the panel
- Adi Leviatan, President - Abrasive Systems Division, 3M
- David Reger, CEO and Founder, NEURA Robotics
- Jane Heffner, VP Sales - Americas, MiR
- Mike Cicco, President and CEO, FANUC America Corporation
- Robert Huschka, Moderator, (A3)
IFR President Marina Bill will present the preliminary figures on industrial robot shipments on the North American market.
- When: Wednesday, May 8, 2024, 10:30 AM – 11:45 AM
- Where: Automate Show Theater at McCormick Place in Chicago